Selected Presentations, Toolboxes & Video
We believe that sharing knowledge and technology is fundamental for the progress of science and technology.
In the following, you find a selection of the computer codes produced at ACSL
that we are pleased to share with everyone.
In this YouTube video,
we show flight test results of an adaptive control law designed to regulate the longitudinal dynamics of an autonomous quad-biplane UAV, that is,
an aircraft that takes off and lands like a quadcopter and flies like a biplane.
In this YouTube video,
we show an autonomous ground vehicle obtained by modifying both the hardware and the software of a Turtlebot 3 Waffle Pi.
This platform is used as testbed for innovative guidance, navigation, and control systems produced at ACSL.
In this YouTube video,
we show the results of a flight test of an autonomous tilt-rotor UAS, whose autopilot embeds an original nonlinear robust adaptive control law for switched dynamical systems.
In this test, the UAS must install a camera on a wall by means of a suction cup.
A significant challenge is given by the hybrid nature of the underlying dynamical model.
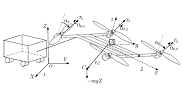
In this YouTube video,
we show the results of a flight test of an autonomous tilt-rotor UAS, whose autopilot embeds an original nonlinear robust adaptive control law.
In this test, the UAS must pull a cart connected by a fishing line to the edge of the vehicle.
The control algorithm is unaware of the presence of the cart, and
the fishing line is slack at the beginning of the mission.
In this YouTube video,
we show the results of a numerical simulation, wherein we control a tilt-rotor quadcopter equipped with an actuated inverted pendulum.
This vehicle's autopilot implements a robust model reference adaptive control law that verifies user-defined constraints on the trajectory tracking error
and the adaptive gains at all time.
In this YouTube video,
we show step by step how to build one of the custom-made quadcopters currently in use at the Advanced Control Systems Lab.
All materials used are listed and all steps are thoroughly commented.
For its tutorial style, this video is recommended for amateurs and non-experts.
In this YouTube video,
we show the final resul of a senior-year capstone project at the ACSL.
A robotic arm was integrated with a monocular camera so that it could autonomosly look for a bottle, grab it, and poor its content in a bowl.
The arm has no prior knowledge of the bottle's position, weight, or shape.
In future, this arm will be installed on a quadcopter.
This Simulink toolbox
is a CAD-based simulator for a quadtoror landing on a ship at sea;
The aircraft can be controlled by a 4-axis joystick.
This toolbox allows to compare and constrasts the ability of an adaptive controller and a PID-based controller
to help pilots landing quadrotors despite the ship's movement, the wind, and the failure of one propeller.
This set of slides presents advanced notions in quadcopter dynamics and control and illustrates
how latest results in nonlinear robust control can be coded and implemented on multi-rotor UAVs.
These slides were presented at the 2019 Workshop "Current Topics in Theory and Practice" organized by the IEEE Committee on Aerospace Controls.
This set of slides presents fundamental notions in quadcopter dynamics and control and illustrates how to tune proportional-integral-derivative controllers for multi-rotor UAVs.
These slides were prepared in 2019 by ACSL students as part of an NSF-funded research project
"Collaborative Research: Unmanned Aerial Systems and Specialized Workforce Development to Support Oklahoman Agriculture and Industry" performed in collaboration with Rose State College.
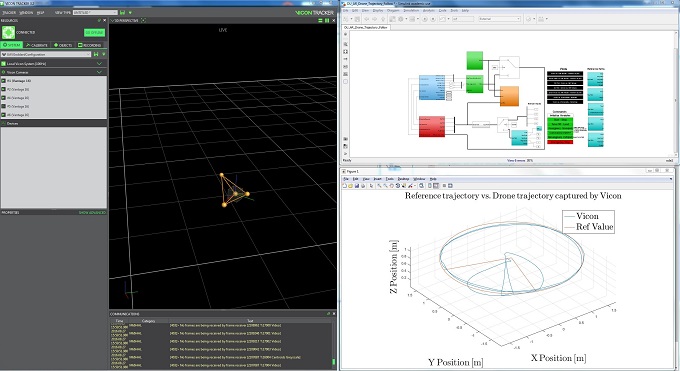
This Simulink toolbox
provides a working example of how multiple AR Drone Parrot 2.0 quadrotors can perform autonomous trajectory tracking by
using Matlab 2015a and a Vicon system for motion capture.
To see this toolbox in action, see this YouTube video.
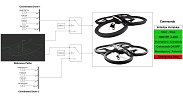
This Simulink toolbox
allows to compare any two control algorithms for quadrotors simultaneously.
The vehicles are not modeled by ordinary differential equations, but
by mean of a CAD model.
PID- and MRAC-based autopilots are provided as working examples.
This Simulink toolbox
provides a working example of how an AR Drone Parrot 2.0 can perform autonomous trajectory tracking by
using Matlab 2015a and a Vicon system for motion capture.